Схема подключения ультразвукового датчика. HC-SR04 Ультразвуковой модуль измерения расстояния
Самодельное охранное оборудование
В. ГУСЬКОВ, В. СВИРИДОВ, г. Самара
Радио, 2002 год, № 8
Работа многих систем охранной сигнализации основана на очень простом принципе: в охраняемом помещении в неурочное время не должно быть никакого движения. Чтобы обнаружить его, помещение "заполняют" излучением - чаще всего радио- или акустическим. Многократно отразившись от стен и находящихся в помещении предметов, лучи достигают приемника. Любое изменение обстановки вызовет модуляцию принятого сигнала, что и зафиксирует датчик.
Акустические (ультразвуковые) датчики такого типа имеют довольно существенное преимущество над использующими радиоволны - ничего не излучая в "эфир", они не требуют оформления разрешений на установку и эксплуатацию. Читателям предлагается описание одного из подобных датчиков, сравнительно простого и достаточно чувствительного для охраны помещения площадью до 20 м 2 .
В отличие от акустических датчиков, описания которых были ранее опубликованы в журнале "Радио" , предлагаемый действует по несколько иному принципу, защищенному патентом .
Основные технические характеристики
Частота звука, кГц...............10
Излучаемая акустическая
мощность, мВт, не более........5
Напряжение питания (постоянное), В................10...16
Потребляемая мощность
в дежурном режиме, мВт......120
Габариты, мм............150x50x30
Выходная цепь - "сухие" контакты реле, кроме того, о срабатывании сигнализирует зажигание светодиода.
Схема прибора
Для увеличения кликните по изображению (откроется в новом окне)
К входу усилителя на ОУ DA1.1 и DA1.2 подключен пьезоэлектрический микрофон ВМ1, к выходу - пьезоэлектрический звукоизлучатель BF1. В результате усилитель охвачен акустической обратной связью через контролируемый газовый объем, за счет которой в системе возникают автоколебания. Их частота зависит от АЧХ и ФЧХ элементов (в первую очередь микрофона и излучателя) и от акустических свойств охраняемого помещения. Амплитуду колебаний поддерживает постоянной система АРУ из детектора на диодах VD2, VD3 и усилителя на одном из элементов микросхемы DA2 К176ЛП1. Регулирующими элементами АРУ служат имеющиеся в той же микросхеме отдельные полевые транзисторы, участки сток-исток которых включены в цепи местной обратной связи каскадов на ОУ DA1.1 и DA1.2.
Если в чувствительной зоне датчика движется какой-либо объект (нарушитель), изменяется затухание и задержка отраженных от него акустических волн, что приводит к изменению амплитуды генерируемых датчиком колебаний. Цепями R7C10 и R6C1C6 заданы частотные характеристики контура АРУ, необходимые для устойчивой работы датчика в различных условиях при эффективном слежении за изменениями амплитуды сигнала.
Переменная составляющая напряжения на выходе усилителя АРУ, вызванная движением, поступает на вход компаратора DA1.3. Порог срабатывания устанавливают подстроечным резистором R8. К выходу компаратора через буферный усилитель из двух соединенных параллельно элементов микросхемы DD1 подключен светодиод HL1, вспышками свидетельствующий о движении в охраняемом помещении.
Кроме того, сигнал с выходов элементов DD1.1 и DD1.2 запускает одновибратор на элементах DD1.3 и DD1.4, импульсы которого открывают ключ на транзисторе VT2, заставляя сработать реле К1. Одновибратор генерирует импульсы лишь при условии, что на входе 13 элемента DD1.4 - высокий логический уровень. Благодаря цепи R14C16 этот уровень будет достигнут лишь через некоторое время после включения питания, давая датчику возможность войти в установившийся режим, не подавая сигналов тревоги.
Если тревожные импульсы повторяются слишком часто, конденсатор С16 разряжается через резистор R16 и диод VD5, что блокирует запуск одновибрато-ра и предотвращает лишние срабатывания реле К1. Таким образом достигается значительная экономия ресурса реле и потребляемой мощности.
Стабилизатор напряжения питания построен по несколько необычной схеме с регулирующим транзистором VT1 в минусовой цепи, что позволило уменьшить число деталей в приборе. Диод VD1 защищает от неправильной полярности подключения к источнику питания.
Внешний вид датчика показан на рис. 2.

Он собран на печатной плате, помещенной в корпус из изоляционного материала, например, полистирола. На верхней крышке корпуса установлены микрофон ВМ1 и излучатель BF1, акустически изолированные от корпуса и друг от друга с помощью поролоновых шайб толщиной 3 мм. Чем больше расстояние между излучателем и микрофоном, тем выше чувствительность датчика. В авторской конструкции оно составило 100 мм. В той же крышке предусмотрено отверстие для светодиода HL1.
В качестве BF1 и ВМ1 применены одинаковые пьезопреобразователи ВУТА-1, выпускаемые предприятием «Альфа-Оптим» (г. Волгоград). Замена их на более высокочастотные и чувствительные желательна, однако это потребует некоторых доработок датчика, изменяющих частотные характеристики контура автогенерации.
В датчике установлены оксидные конденсаторы К50-35, керамические К10-17, резисторы МЛТ-0,125, реле РЭС55А (паспорт РС4.569.600-01). Транзисторы КТ361Б можно заменить на КТ361Г, КТ361Е и другие маломощные кремниевые структуры р-п-р.
При регулировке чувствительности датчика (подстроечным резистором R8) иногда приходится для достижения нужного результата поменять местами выводы 12 и 13 элемента DA1.3.
ЛИТЕРАТУРА
1. Вилл В. Ультразвуковой автосторож. - Радио, 1996, № 1, с. 52-54.
2. Волков А. УЗ датчик охранной сигнализации. - Радио, 1996, № 5, с. 54-56.
3. Койнов А. Ультразвуковое охранное устройство. - Радио, 1998, № 7, с. 42.
4. Гуськов В., Гуськова М. Способ для определения изменения состояния объема, заполненного упругой средой, и устройства (варианты) для его осуществления. - Патент РФ № 2104494 МКИ 6G 01D1/18, заявлено 26 января 1995 г., опубликовано 10 февраля 1998 г.
Дальномер — это устройство для измерения расстояния до некоторого предмета. Дальномер помогает роботам в разных ситуациях. Простой колесный робот может использовать этот прибор для обнаружения препятствий. Летающий дрон использует дальномер для баражирования над землей на заданной высоте. С помощью дальномера можно даже построить карту помещения, применив специальный алгоритм SLAM.
1. Принцип действия
На этот раз мы разберем работу одного из самых популярных датчиков — ультразвукового (УЗ) дальномера. Существует много разных модификаций подобных устройств, но все они работают по принципу измерения времени прохождения отраженного звука. То есть датчик отправляет звуковой сигнал в заданном направлении, затем ловит отраженное эхо и вычисляет время полета звука от датчика до препятствия и обратно. Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.
Из школьного курса физики мы знаем, что скорость звука в некоторой среде величина постоянная, но зависящая от плотности среды. Зная скорость звука в воздухе и время полета звука до цели, мы можем рассчитать пройденное звуком расстояние по формуле:
s = v*t
где v — скорость звука в м/с, а t — время в секундах. Скорость звука в воздухе, кстати, равна 340.29 м/с.
Чтобы справиться со своей задачей, дальномер имеет две важные конструктивные особенности. Во-первых, чтобы звук хорошо отражался от препятствий, датчик испускает ультразвук с частотой 40 кГц. Для этого в датчике имеется пьезокерамический излучатель, который способен генерировать звук такой высокой частоты. Во-вторых, излучатель устроен таким образом, что звук распространяется не во все стороны (как это бывает у обычных динамиков), а в узком направлении. На рисунке представлена диаграмма направленности типичного УЗ дальномера.
 Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
Как видно на диаграмме, угол обзора самого простого УЗ дальномера составляет примерно 50-60 градусов. Для типичного варианта использования, когда датчик детектирует препятствия перед собой, такой угол обзора вполне пригоден. Ультразвук сможет обнаружить даже ножку стула, тогда как лазерный дальномер, к примеру, может её не заметить.
Если же мы решим сканировать окружающее пространство, вращая дальномер по кругу как радар, УЗ дальномер даст нам очень неточную и шумную картину. Для таких целей лучше использовать как раз лазерный дальномер.
Также следует отметить два серьезных недостатка УЗ дальномера. Первый заключается в том, что поверхности имеющие пористую структуру хорошо поглощают ультразвук, и датчик не может измерить расстояние до них. Например, если мы задумаем измерить расстояние от мультикоптера до поверхности поля с высокой травой, то скорее всего получим очень нечеткие данные. Такие же проблемы нас ждут при измерении дистанции до стены покрытой поролоном.
Второй недостаток связан со скоростью звуковой волны. Эта скорость недостаточно высока, чтобы сделать процесс измерения более частым. Допустим, перед роботом есть препятствие на удалении 4 метра. Чтобы звук слетал туда и обратно, потребуется целых 24 мс. Следует 7 раз отмерить, прежде чем ставить УЗ дальномер на летающих роботов.
2. Ультразвуковой дальномер HC-SR04
В этом уроке мы будем работать с датчиком HC-SR04 и контроллером Ардуино Уно. Этот популярный дальномер умеет измерять расстояние от 1-2 см до 4-6 метров. При этом, точность измерения составляет 0.5 — 1 см. Встречаются разные версии одного и того же HC-SR04. Одни работают лучше, другие хуже. Отличить их можно по рисунку платы на обратной стороне. Версия, которая работает хорошо выглядит так:
 А вот версия, которая может давать сбои:
А вот версия, которая может давать сбои:


3. Подключение HC-SR04
Датчик HC-SR04 имеет четыре вывода. Кроме земли (Gnd) и питания (Vcc) еще есть Trig и Echo. Оба этих вывода цифровые, так что подключаем из к любым выводам Ардуино Уно:| HC-SR04 | GND | VCC | Trig | Echo |
| Arduino Uno | GND | +5V | 3 | 2 |
 Внешний вид макета
Внешний вид макета

4. Программа
Итак, попробуем приказать датчику отправить зондирующий ультразвуковой импульс, а затем зафиксируем его возвращение. Посмотрим как выглядит временная диаграмма работы HC-SR04. На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig
положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo
, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo
.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
int echoPin = 2;
int trigPin = 3;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
}
Функция pulseIn
замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Загружаем программу на Ардуино Уно и открываем монитор последовательного порта. Попробуем теперь наводить датчик на разные предметы и смотреть в мониторе рассчитанное расстояние.
На диаграмме видно, что для начала измерения нам необходимо сгенерировать на выводе Trig
положительный импульс длиной 10 мкс. Вслед за этим, датчик выпустит серию из 8 импульсов и поднимет уровень на выводе Echo
, перейдя при этом в режим ожидания отраженного сигнала. Как только дальномер почувствует, что звук вернулся, он завершит положительный импульс на Echo
.
Получается, что нам нужно сделать всего две вещи: создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию по нехитрой формуле. Делаем.
int echoPin = 2;
int trigPin = 3;
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, cm;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
cm = duration / 58;
Serial.print(cm);
Serial.println(" cm");
delay(100);
}
Функция pulseIn
замеряет длину положительного импульса на ноге echoPin в микросекундах. В программе мы записываем время полета звука в переменную duration. Как мы уже выяснили ранее, нам потребуется умножить время на скорость звука:
s = duration * v = duration * 340 м/с
Переводим скорость звука из м/с в см/мкс:
s = duration * 0.034 м/мкс
Для удобства преобразуем десятичную дробь в обыкновенную:
s = duration * 1/29 = duration / 29
А теперь вспомним, что звук прошел два искомых расстояния: до цели и обратно. Поделим всё на 2:
s = duration / 58
Теперь мы знаем откуда взялось число 58 в программе!
Загружаем программу на Ардуино Уно и открываем монитор последовательного порта. Попробуем теперь наводить датчик на разные предметы и смотреть в мониторе рассчитанное расстояние.
Задания
Теперь, когда мы умеем вычислять расстояние с помощью дальномера, сделаем несколько полезных устройств.- Строительный дальномер. Программа каждые 100мс измеряет расстояние с помощью дальномера и выводит результат на символьный ЖК дисплей. Для удобства полученное устройство можно поместить в небольшой корпус и запитать от батареек.
- Ультразвуковая трость. Напишем программу, которая будет «пищать» зуммером с различной частотой, в зависимости от измеренного расстояния. Например, если расстояние до препятствия более трех метров — зуммер издает звук раз в пол секунды. При расстоянии 1 метр — раз в 100мс. Менее 10см — пищит постоянно.
Заключение
Ультразвуковой дальномер — простой в использовании, дешевый и точный датчик, который отлично выполняет свою функцию на тысячах роботов. Как мы выяснили из урока, у датчика есть недостатки, которые следует учитывать при постройке робота. Хорошим решением может стать совместное использование ультразвукового дальномера в паре с лазерным. В таком случае, они будут нивелировать недостатки друг друга.Входное напряжение 5 В постоянного тока, подаётся на выводы Vcc и GND датчика.
Подробнее о датчике:
Если подать положительный импульс на вход датчика TRIG длительностью 10 мкс, то датчик отправит звуковую волну (8 импульсов на частоте 40 кГц - ультразвук) и установит уровень логической «1» на выходе ECHO. Звуковая волна отразится от препятствия и вернётся на приёмник датчика, после чего он сбросит уровень на выходе ECHO в логический «0» (то же самое датчик сделает, если звуковая волна не вернётся в течении 38 мс.) В результате время наличия логической «1» на выходе ECHO равно времени прохождения ультразвуковой волны от датчика до препятствия и обратно. Зная скорость распространения звуковой волны в воздухе и время наличия логической «1» на выводе ECHO, можно рассчитать расстояние до препятствия.

Расстояние вычисляется умножением скорости на время (в данном случае скорости распространения звуковой волны V , на время ожидания эха Echo ). Но так звуковая волна проходит расстояние от датчика до объекта и обратно, а нам нужно только до объекта, то результат делим на 2:
L = V * Echo / 2
- L – расстояние (м);
- V – скорость звука в воздухе (м/с);
- Echo – время ожидания эха (с).
Скорость звука в воздухе , в отличии от скорости света, величина не постоянная и сильно зависит от температуры:
V 2 = γ R T / M
- V – скорость звука в воздухе (м/с)
- γ – показатель адиабаты воздуха (ед.) = 7/5
- R – универсальная газовая постоянная (Дж/моль*K) = 8,3144598(48)
- T ° К) = t°C + 273,15
- M – молекулярная масса воздуха (г/моль) = 28,98
Подставив в формулу известные значения γ , R , M , получим:
V ≈ 20,042 √T
- T – абсолютная температура воздуха (° К) = t°C + 273,15
Осталось объединить формулы вычисления V и L , и перевести L из м в см, Echo из с в мкс, T из °К в °C, получим:
L ≈ Echo √(t+273,15) / 1000
- L – расстояние (см)
- Echo – время ожидания эха (мкс)
- t – температура воздуха (°C)
iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков. Они сами рассчитывают все значения и возвращают только расстояние в см. Температура по умолчанию установлена в 23°C, но её можно указывать. Работа с библиотеками и их функции описаны ниже.
Для работы с датчиком, нами разработаны две библиотеки iarduino_HC_SR04 и iarduino_HC_SR04_int , синтаксис обеих библиотек одинаков.
- Преимуществом библиотеки iarduino_HC_SR04 является то, что датчики можно подключать к любым выводам Arduino , а недостаток заключается в том, что библиотека ждёт ответа от датчика, который может длиться до 38 мс.
- Преимуществом библиотеки iarduino_HC_SR04_int является то, что она не ждёт ответа от датчиков (не приостанавливает выполнение скетча), но выводы ECHO датчиков нужно подключать только к тем выводам Arduino , которые используют внешние прерывания.
Подробнее про установку библиотеки читайте в нашей .
Примеры:
Определение расстояния с использованием библиотеки iarduino_HC_SR04:
#includeОпределение расстояния с использованием библиотеки iarduino_HC_SR04_int:
#include Результат работы обоих примеров:

Из примера видно, что если во время измерений не учитывать температуру воздуха, то можно получить результаты с высокой погрешностью.
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR04. В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью.
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10 -6 с.

Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
Где купить модуль SR04 для Ардуино
Датчик расстояния – достаточно распространенный компонент и его без труда можно найти в интернет-магазинах. Самые дешевые варианты (от 40-60 рублей за штуку), традиционно на всем известном сайте.
 Модуль датчика расстояния HC-SR04 для Ардуино Модуль датчика расстояния HC-SR04 для Ардуино
|
 Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика
|
 Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики) Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики)
|
 Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика
|
Схема взаимодействия с Arduino
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.

Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.

Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:

Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Также для повышения точности надо правильно направить датчик: сделать так, чтобы предмет был в рамках конуса диаграммы направленности. Проще говоря, “глазки” HC-SR04 должны смотреть прямо на предмет.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, ) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Примеры использования датчика расстояния
Давайте рассмотрим пример простого проекта с платой Arduino Uno и датчиком расстояния HC SR04. В скетче мы будем получать значение расстояния до предметов и выводить их в монитор порта в среде Arduino IDE. Вы сможете легко изменить скетч и схему подключения, чтобы датчик сигнализировал о приближении или отдалении предмета.
Подключение датчика к ардуино
При написании скетча использовалась следующий вариант распиновки подключения датчика:
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Пример скетча
Начнем работу с датчиком сразу с относительного сложного варианта – без использования внешних библиотек.
В данном скетче мы выполняем такую последовательность действий:
- Коротким импульсом (2-5 микросекунды) переводим датчик расстояния в режим эхолокации, при котором в окружающее пространство высылаются ультразвуковые волны с частотой 40 КГц.
- Ждем, пока датчик проанализирует отраженные сигналы и по задержке определит расстояние.
- Получаем значение расстояния. Для этого ждем, пока HC SR04 выдаст на входе ECHO импульс, пропорциональный расстоянию. Мы определяем длительность импульса с помощью функции pulseIn, которая вернет нам время, прошедшее до изменения уровня сигнала (в нашем случае, до появления обратного фронта импульса).
- Получив время, мы переводим его в расстояние в сантиметрах путем деления значения на константу (для датчика SR04 это 29.1 для сигнала «туда», столько же для сигнала «обратно», что в сумме даст 58.2).
Если датчик расстояния не выполняет считывание сигнала, то преобразование выходного сигнала никогда не примет значения короткого импульса – LOW. Так как у некоторых датчиков время задержки варьируется в зависимости от производителя, рекомендуется при использовании указанных скетчей выставлять его значение вручную (мы это делаем в начале цикла).
Если расстояние составляет более 3 метров, при котором HC SR04 начинает плохо работать, время задержки лучше выставлять более 20 мс, т.е. 25 или 30 мс.
#define PIN_TRIG 12 #define PIN_ECHO 11 long duration, cm; void setup() { // Инициализируем взаимодействие по последовательному порту Serial.begin (9600); //Определяем вводы и выводы pinMode(PIN_TRIG, OUTPUT); pinMode(PIN_ECHO, INPUT); } void loop() { // Сначала генерируем короткий импульс длительностью 2-5 микросекунд. digitalWrite(PIN_TRIG, LOW); delayMicroseconds(5); digitalWrite(PIN_TRIG, HIGH); // Выставив высокий уровень сигнала, ждем около 10 микросекунд. В этот момент датчик будет посылать сигналы с частотой 40 КГц. delayMicroseconds(10); digitalWrite(PIN_TRIG, LOW); // Время задержки акустического сигнала на эхолокаторе. duration = pulseIn(PIN_ECHO, HIGH); // Теперь осталось преобразовать время в расстояние cm = (duration / 2) / 29.1; Serial.print("Расстояние до объекта: "); Serial.print(cm); Serial.println(" см."); // Задержка между измерениями для корректной работы скеча delay(250); }
Скетч с использованием библиотеки NewPing
Теперь давайте рассмотрим вариант скетча с использованием библиотеки NewPing. Код существенно упростится, т.к. все описанные ранее действия спрятаны внутри библиотеки. Все, что нам нужно сделать – создать объект класса NewPing, указав пины, с помощью которых мы подключаем датчик расстояния и использовать методы объекта. В нашем примере для получения расстояния в сантиметрах нужно использовать ping_cm().
#include
Пример подключения ультразвукового дальномера HC SR04 с одним пином
Подключение HC-SR04 к Arduino может быть выполнено посредством использования одного пина. Такой вариант пригодится, если вы работаете с большим проектом и вам не хватает свободных пинов. Для подключения вам нужно просто установить между контактами TRIGи ECHO резистор номиналом 2.2K и подключить к ардуино контакт TRIG.
#include
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
Здесь же я отдельно вынес такой важный практический вопрос, как подключение индуктивных датчиков с транзисторным выходом, которые в современном промышленном оборудовании – повсеместно. Кроме того, приведены реальные инструкции к датчикам и ссылки на примеры.
Принцип активации (работы) датчиков при этом может быть любым – индуктивные (приближения), оптические (фотоэлектрические), и т.д.
В первой части были описаны возможные варианты выходов датчиков. По подключению датчиков с контактами (релейный выход) проблем возникнуть не должно. А по транзисторным и с подключением к контроллеру не всё так просто.
Схемы подключения датчиков PNP и NPN
Отличие PNP и NPN датчиков в том, что они коммутируют разные полюсы источника питания. PNP (от слова “Positive”) коммутирует положительный выход источника питания, NPN – отрицательный.
Ниже для примера даны схемы подключения датчиков с транзисторным выходом. Нагрузка – как правило, это вход контроллера.
Датчика. Нагрузка (Load) постоянно подключена к “минусу” (0V), подача дискретной “1” (+V) коммутируется транзистором. НО или НЗ датчик – зависит от схемы управления (Main circuit)
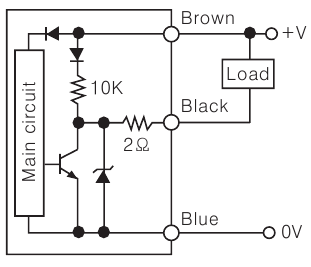
Датчика. Нагрузка (Load) постоянно подключена к “плюсу” (+V). Здесь активный уровень (дискретный “1”) на выходе датчика – низкий (0V), при этом на нагрузку подается питание через открывшийся транзистор.
Призываю всех не путаться, работа этих схем будет подробно расписана далее.
На схемах ниже показано в принципе то же самое. Акцент уделён на отличия в схемах PNP и NPN выходов.

Схемы подключения NPN и PNP выходов датчиков
На левом рисунке – датчик с выходным транзистором NPN . Коммутируется общий провод, который в данном случае – отрицательный провод источника питания.
Справа – случай с транзистором PNP на выходе. Этот случай – наиболее частый, так как в современной электронике принято отрицательный провод источника питания делать общим, а входы контроллеров и других регистрирующих устройств активировать положительным потенциалом.
Как проверить индуктивный датчик?
Для этого нужно подать на него питание, то есть подключить его в схему. Затем – активировать (инициировать) его. При активации будет загораться индикатор. Но индикация не гарантирует правильной работы индуктивного датчика. Нужно подключить нагрузку, и измерить напряжение на ней, чтобы быть уверенным на 100%.
Замена датчиков
Как я уже писал, есть принципиально 4 вида датчиков с транзисторным выходом, которые подразделяются по внутреннему устройству и схеме включения:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Все эти типы датчиков можно заменить друг на друга, т.е. они взаимозаменяемы.
Это реализуется такими способами:
- Переделка устройства инициации – механически меняется конструкция.
- Изменение имеющейся схемы включения датчика.
- Переключение типа выхода датчика (если имеются такие переключатели на корпусе датчика).
- Перепрограммирование программы – изменение активного уровня данного входа, изменение алгоритма программы.
Ниже приведён пример, как можно заменить датчик PNP на NPN, изменив схему подключения:

PNP-NPN схемы взаимозаменяемости. Слева – исходная схема, справа – переделанная.
Понять работу этих схем поможет осознание того факта, что транзистор – это ключевой элемент, который можно представить обычными контактами реле (примеры – ниже, в обозначениях).
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:
Итак, схема слева. Предположим, что тип датчика – НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные “контакты” разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к входу контроллера или другой нагрузке. Сопротивление этого входа и является основной нагрузкой.
Если внутренней нагрузки в датчике нет, и коллектор “висит в воздухе”, то это называют “схема с открытым коллектором”. Эта схема работает ТОЛЬКО с подключенной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Бывают ситуации, когда нужного датчика нет под рукой, а станок должен работать “прям щас”.
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 – 10 кОм. Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов – тахометр, или количество заготовок.
Да, не совсем то, что мы хотели, и схемы взаимозаменяемости npn и pnp датчиков не всегда приемлемы.
Как добиться полного функционала? Способ 1 – механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 – перепрограммировать вход контроллера чтобы дискретный “0” был активным состоянием контроллера, а “1” – пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Условное обозначение датчика приближения
На принципиальных схемах индуктивные датчики (датчики приближения) обозначают по разному. Но главное – присутствует квадрат, повёрнутый на 45° и две вертикальные линии в нём. Как на схемах, изображённых ниже.

НО НЗ датчики. Принципиальные схемы.
На верхней схеме – нормально открытый (НО) контакт (условно обозначен PNP транзистор). Вторая схема – нормально закрытый, и третья схема – оба контакта в одном корпусе.
Цветовая маркировка выводов датчиков
Существует стандартная система маркировки датчиков. Все производители в настоящее время придерживаются её.
Однако, нелишне перед монтажом убедиться в правильности подключения, обратившись к руководству (инструкции) по подключению. Кроме того, как правило, цвета проводов указаны на самом датчике, если позволяет его размер.
Вот эта маркировка.
- Синий (Blue) – Минус питания
- Коричневый (Brown) – Плюс
- Чёрный (Black) – Выход
- Белый (White) – второй выход, или вход управления, надо смотреть инструкцию.
Система обозначений индуктивных датчиков
Тип датчика обозначается цифро-буквенным кодом, в котором зашифрованы основные параметры датчика. Ниже приведена система маркировки популярных датчиков Autonics. / Каталог датчиков приближения Omron, pdf, 1.14 MB, скачан:1282 раз./
/ Чем можно заменить датчики ТЕКО, pdf, 179.92 kB, скачан:1032 раз./
/ Датчики фирмы Turck, pdf, 4.13 MB, скачан:1362 раз./
/ Схема включения датчиков по схемам PNP и NPN в программе Splan/ Исходный файл., rar, 2.18 kB, скачан:2216 раз./
Реальные датчики
Датчики купить проблематично, товар специфический, и в магазинах электрики такие не продают. Как вариант, их можно купить в Китае, на АлиЭкспрессе.
А вот какие я встречаю в своей работе.
Всем спасибо за внимание, жду вопросов по подключению датчиков в комментариях!