Питание ультразвуковой датчик для ардуино. Как подключить ультразвуковой дальномер HC-SR04 к Arduino
Статья посвящена ультразвуковому датчику расстояния HC–SR04.
Объясняется принцип его действия, технические характеристики, приведен пример его подключения к Arduino и программы для прошивки микроконтроллера.
Описание HC-SR04
Ультразвуковой датчик расстояния - модуль HC-SR04 использует акустическое излучение для определения расстояния до объекта. Этот бесконтактный датчик обеспечивает высокую точность и стабильность измерений. Диапазон измерений составляет: от 2 см до 400 см. На показания датчика практически не влияют солнечное излучение и электромагнитные шумы. Модуль продается в комплекте с трансмиттером и ресивером.
Технические характеристики HC-SR04
- Напряжение питания: +5В – постоянный ток;
- Сила тока покоя: < 2 мА;
- Рабочая сила тока: 15 мА;
- Эффективный рабочий угол: < 15°;
- Расстояние измерений: от 2 см до 400 см (1 – 13 дюймов);
- Разрешающая способность: 0.3 см;
- Угол измерений: 30 градусов;
- Ширина импульса триггера: 10 микросекунд;
- Размеры: 45 мм x 20 мм x 15 мм.
Общий вид датчика HC-SR04
- VCC: +5 вольт (постоянный ток)
- Trig: Триггер (INPUT)
- Echo: Эхо (OUTPUT)
- GND: Земля
Подключение датчика HC–SR04 к Arduino
В данном примере ультразвуковой датчик HC–SR04 определяет расстояние и выводит полученные значения в окно серийного монитора в среде Arduino IDE. Проект несложный.
Основная цель данного примера – помочь вам понять принцип действия датчика для дальнейшего использования в более комплексных проектах.
Небольшое примечание: в свободном доступе существует отличная библиотека NewPing , которая еще больше облегчает использование HC–SR04, пример ее использование тоже приведен ниже.
Схема подключения HC–SR04 к Arduino

Программа для Arduino
/*Ультразвуковой датчик расстояния и Arduino – полный гайд
Распиновка ультразвукового датчика расстояния:
Trig: Триггер (INPUT) – 11 пин
Echo: Эхо (OUTPUT) – 12 пин
int trigPin = 11; //Триггер – зеленый проводник
int echoPin = 12; //Эхо – желтый проводник
long duration, cm, inches;
//Serial Port begin
Serial.begin (9600);
//Инициализирум входы и выходы
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Датчик срабатывает и генерирует импульсы шириной 10 мкс или больше
// Генерируем короткий LOW импульс, чтобы обеспечить «чистый» импульс HIGH:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Считываем данные с ультразвукового датчика: значение HIGH, которое
// зависит от длительности (в микросекундах) между отправкой
// акустической волны и ее обратном приеме на эхолокаторе.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// преобразование времени в расстояние
cm = (duration/2) / 29.1;
inches = (duration/2) / 74;
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
#include
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
Serial.begin(9600);
Serial.print(uS);
Serial.println(“cm”);
Использование библиотеки NewPing
Ниже приведен пример программы с использованием библиотеки NewPing.
#include
#define TRIGGER_PIN 12
#define ECHO_PIN 11
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // Настройка пинов и максимального расстояния.
Serial.begin(9600);
unsigned int uS = sonar.ping_cm();
Serial.print(uS);
Serial.println(“cm”);
Необходимые уточнения
Если HC-SR04 не считывает сигнал эхо, выходной сигнал никогда не преобразуется в LOW. Датчики Devantec и Parallax обеспечивают время задержки 36 миллисекунд 28 миллисекунд соответственно. Если вы используете скетч, приведенный выше, программа «зависнет» на 1 секунду. Поэтому желательно указывать параметр задержки.
Датчик HC-SR04 плохо работает при измерении расстояний более 10 футов. Время возврата импульса составляет около 20 миллисекунд, так что рекомендуется в таких случаях выставлять время задержки более 20, напрмер, 25 или 30 миллисекунд.
Можно подключить ультразвуковой датчик расстояния HC-SR04 лишь к одному пину Arduino. Для этого необходимо между пинами Триггера и Эхо установить резистор на 2.2 кОм и подключить к Arduino только пин Триггера.
Подключение ультразвукового датчика расстояния к Arduino с использованием 1 пина!
Схема подключения и скетч для ультразвукового датчика расстояния SRF06 приведены ниже.

// Скетч с библиотекой NewPing, которая может использоваться и для датчика HC-SR04 и для
//приведенного здесь SRF06 и позволяет подключать ульразвуковые датчики
// с помощью одного пина на Arduino. Можно дополнительно подключить конденсатор на 0.1 мкФ к пинам Эхо и Триггер на датчике.
// К Arduino подключается пин Триггер
#include
#define PING_PIN 12 // Пин с Arduino подключен к пинам trigger и echo на ультразвуковом датчике расстояния
#define MAX_DISTANCE 200 // Максимальное расстояние, которое мы контролируем (в сантиметрах). Максимальное расстояние подобных датчиков находится в диапазоне 400-500см.
NewPing sonar(PING_PIN, PING_PIN, MAX_DISTANCE); // Настройка пинов и максимального расстояния
Serial.begin(115200); // Открытие серийного протокола с частотой передачи данных 115200 бит/сек.
delay(50); // Задержка в 50 миллисекунд между генерацией волн. 29 миллисекунд – минимально допустимая задержка.
unsigned int uS = sonar.ping(); // Генерация сигнала, получение времени в микросекундах (uS).
Serial.print("Ping: ");
Serial.print(uS / US_ROUNDTRIP_CM); // Преобразование времени в расстояние и отображение результата (0 соответствует выходу за допустимый диапазон)
Ультразвуковые датчики расстояния Ардуино очень востребованы в робототехнических проектах из-за своей относительной простоты, достаточной точности и доступности. Они могут быть использованы как приборы, помогающие объезжать препятствия, получать размеры предметов, моделировать карту помещения и сигнализировать о приближении или удалении объектов. Одним из распространенных вариантов такого устройства является датчик расстояния, в конструкцию которого входит ультразвуковой дальномер HC SR04. В этой статье мы познакомимся с принципом действия датчика расстояния, рассмотрим несколько вариантов подключения к платам Arduino, схему взаимодействия и примеры скетчей.
Способность ультразвукового датчика определять расстояние до объекта основано на принципе сонара – посылая пучок ультразвука, и получая его отражение с задержкой, устройство определяет наличие объектов и расстояние до них. Ультразвуковые сигналы, генерируемые приемником, отражаясь от препятствия, возвращаются к нему через определенный промежуток времени. Именно этот временной интервал становится характеристикой помогающей определить расстояние до объекта.
Внимание! Так как в основу принципа действия положен ультразвук, то такой датчик не подходит для определения расстояния до звукопоглощающих объектов. Оптимальными для измерения являются предметы с ровной гладкой поверхностью.
Описание датчика HC SR04
Датчик расстояния Ардуино является прибором бесконтактного типа, и обеспечивает высокоточное измерение и стабильность. Диапазон дальности его измерения составляет от 2 до 400 см. На его работу не оказывает существенного воздействия электромагнитные излучения и солнечная энергия. В комплект модуля с HC SR04 arduino также входят ресивер и трансмиттер.
Ультразвуковой дальномер HC SR04 имеет такие технические параметры:
- Питающее напряжение 5В;
- Рабочий параметр силы т ока – 15 мА;
- Сила тока в пассивном состоянии < 2 мА;
- Обзорный угол – 15°;
- Сенсорное разрешение – 0,3 см;
- Измерительный угол – 30°;
- Ширина импульса – 10 -6 с.

Датчик оснащен четырьмя выводами (стандарт 2, 54 мм):
- Контакт питания положительного типа – +5В;
- Trig (Т) – выход сигнала входа;
- Echo (R) – вывод сигнала выхода;
- GND – вывод «Земля».
Где купить модуль SR04 для Ардуино
Датчик расстояния – достаточно распространенный компонент и его без труда можно найти в интернет-магазинах. Самые дешевые варианты (от 40-60 рублей за штуку), традиционно на всем известном сайте.
 Модуль датчика расстояния HC-SR04 для Ардуино Модуль датчика расстояния HC-SR04 для Ардуино
|
 Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика Еще один вариант ультразвукового сенсора HC-SR04 у надежного поставщика
|
 Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики) Датчики расстояния SR05 Ultrasonic HC-SR05 (улучшенные характеристики)
|
 Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика Модуль HC-SR05 HY-SRF05 для UNO R3 MEGA2560 DUE от надежного поставщика
|
Схема взаимодействия с Arduino
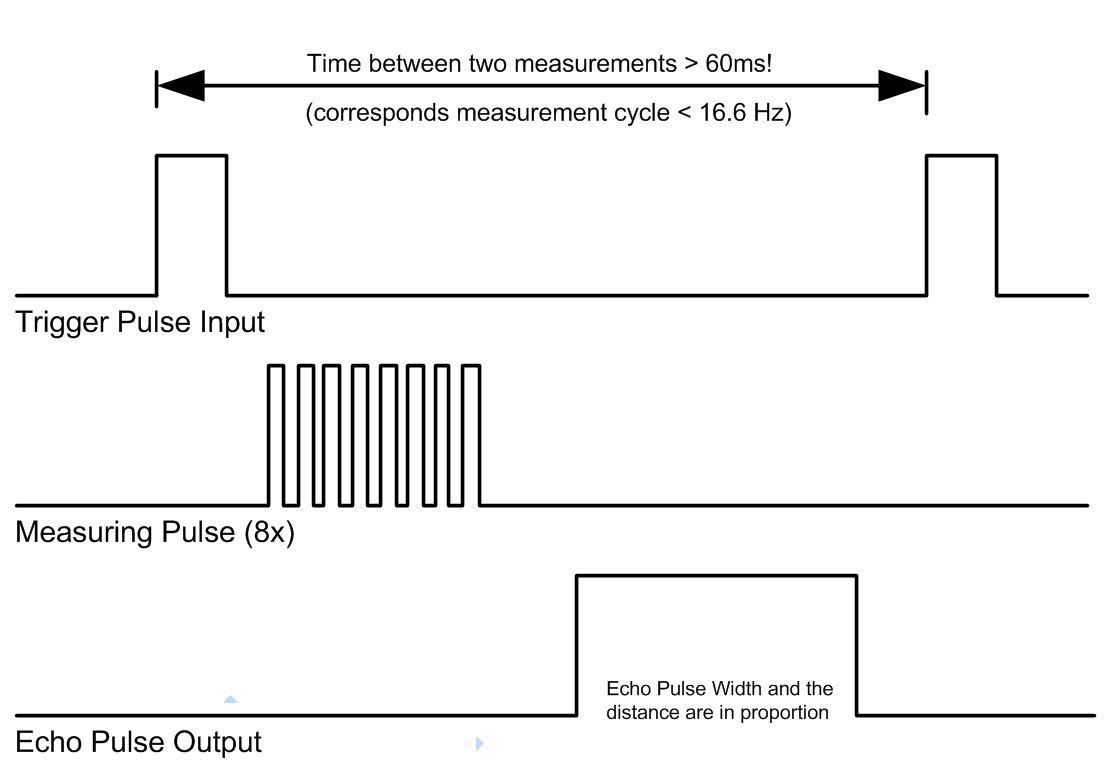
Для получения данных, необходимо выполнить такую последовательность действий:
- Подать на выход Trig импульс длительностью 10 микросек;
- В ультразвуковом дальномере hc sr04 подключенном к arduino произойдет преобразование сигнала в 8 импульсов с частотой 40 кГц, которые через излучатель будут посланы вперед;
- Когда импульсы дойдут до препятствия, они отразятся от него и будут приняты приемником R, что обеспечит наличие входного сигнала на выходе Echo;
- На стороне контроллера полученный сигнал при помощи формул следует перевести в расстояние.
При делении ширины импульса на 58.2, получим данные в сантиметрах, при делении на 148 – в дюймах.
Подключение HC SR04 к Arduino
Выполнить подключение ультразвукового датчика расстояния к плате Arduino достаточно просто. Схема подключения показана на рисунке.

Контакт земли подключаем к выводу GND на плате Arduino, выход питания соединяем с 5V. Выходы Trig и Echo подсоединяем к arduino на цифровые пины. Вариант подключения с помощью макетной платы:

Библиотека для работы с HC SR04
Для облегчения работы с датчиком расстояния HC SR04 на arduino можно использовать библиотеку NewPing. Она не имеет проблем с пинговыми доступами и добавляет некоторые новые функции.
К особенностям библиотеки можно отнести:
- Возможность работы с различными ультразвуковыми датчиками;
- Может работать с датчиком расстояния всего через один пин;
- Отсутствие отставания на 1 секунду при отсутствии пинга эха;
- Для простой коррекции ошибок есть встроенный цифровой фильтр;
- Максимально точный расчет расстояния.
Скачать бибилотеку NewPing можно
Точность измерения расстояния датчиком HC SR04
Точность датчика зависит от нескольких факторов:
- температуры и влажности воздуха;
- расстояния до объекта;
- расположения относительно датчика (согласно диаграммы излучения);
- качества исполнения элементов модуля датчика.
В основу принципа действия любого ультразвукового датчика заложено явление отражения акустических волн, распространяющихся в воздухе. Но как известно из курса физики, скорость распространения звука в воздухе зависит от свойств этого самого воздуха (в первую очередь от температуры). Датчик же, испуская волны и замеряя время до их возврата, не догадывается, в какой именно среде они будут распространяться и берет для расчетов некоторую среднюю величину. В реальных условиях из-за фактора температуры воздуха HC-SR04 может ошибаться от 1 до 3-5 см.
Фактор расстояния до объекта важен, т.к. растет вероятность отражения от соседних предметов, к тому же и сам сигнал затухает с расстоянием.
Также для повышения точности надо правильно направить датчик: сделать так, чтобы предмет был в рамках конуса диаграммы направленности. Проще говоря, “глазки” HC-SR04 должны смотреть прямо на предмет.
Для уменьшения ошибок и погрешности измерений обычно выполняются следующие действия:
- усредняются значения (несколько раз замеряем, убираем всплески, потом находим среднее);
- с помощью датчиков (например, ) определяется температура и вносятся поправочные коэффициенты;
- датчик устанавливается на серводвигатель, с помощью которого мы “поворачиваем голову”, перемещая диаграмму направленности влево или вправо.
Примеры использования датчика расстояния
Давайте рассмотрим пример простого проекта с платой Arduino Uno и датчиком расстояния HC SR04. В скетче мы будем получать значение расстояния до предметов и выводить их в монитор порта в среде Arduino IDE. Вы сможете легко изменить скетч и схему подключения, чтобы датчик сигнализировал о приближении или отдалении предмета.
Подключение датчика к ардуино
При написании скетча использовалась следующий вариант распиновки подключения датчика:
- VCC: +5V
- Trig – 12 пин
- Echo – 11 пин
- Земля (GND) – Земля (GND)
Пример скетча
Начнем работу с датчиком сразу с относительного сложного варианта – без использования внешних библиотек.
В данном скетче мы выполняем такую последовательность действий:
- Коротким импульсом (2-5 микросекунды) переводим датчик расстояния в режим эхолокации, при котором в окружающее пространство высылаются ультразвуковые волны с частотой 40 КГц.
- Ждем, пока датчик проанализирует отраженные сигналы и по задержке определит расстояние.
- Получаем значение расстояния. Для этого ждем, пока HC SR04 выдаст на входе ECHO импульс, пропорциональный расстоянию. Мы определяем длительность импульса с помощью функции pulseIn, которая вернет нам время, прошедшее до изменения уровня сигнала (в нашем случае, до появления обратного фронта импульса).
- Получив время, мы переводим его в расстояние в сантиметрах путем деления значения на константу (для датчика SR04 это 29.1 для сигнала «туда», столько же для сигнала «обратно», что в сумме даст 58.2).
Если датчик расстояния не выполняет считывание сигнала, то преобразование выходного сигнала никогда не примет значения короткого импульса – LOW. Так как у некоторых датчиков время задержки варьируется в зависимости от производителя, рекомендуется при использовании указанных скетчей выставлять его значение вручную (мы это делаем в начале цикла).
Если расстояние составляет более 3 метров, при котором HC SR04 начинает плохо работать, время задержки лучше выставлять более 20 мс, т.е. 25 или 30 мс.
#define PIN_TRIG 12 #define PIN_ECHO 11 long duration, cm; void setup() { // Инициализируем взаимодействие по последовательному порту Serial.begin (9600); //Определяем вводы и выводы pinMode(PIN_TRIG, OUTPUT); pinMode(PIN_ECHO, INPUT); } void loop() { // Сначала генерируем короткий импульс длительностью 2-5 микросекунд. digitalWrite(PIN_TRIG, LOW); delayMicroseconds(5); digitalWrite(PIN_TRIG, HIGH); // Выставив высокий уровень сигнала, ждем около 10 микросекунд. В этот момент датчик будет посылать сигналы с частотой 40 КГц. delayMicroseconds(10); digitalWrite(PIN_TRIG, LOW); // Время задержки акустического сигнала на эхолокаторе. duration = pulseIn(PIN_ECHO, HIGH); // Теперь осталось преобразовать время в расстояние cm = (duration / 2) / 29.1; Serial.print("Расстояние до объекта: "); Serial.print(cm); Serial.println(" см."); // Задержка между измерениями для корректной работы скеча delay(250); }
Скетч с использованием библиотеки NewPing
Теперь давайте рассмотрим вариант скетча с использованием библиотеки NewPing. Код существенно упростится, т.к. все описанные ранее действия спрятаны внутри библиотеки. Все, что нам нужно сделать – создать объект класса NewPing, указав пины, с помощью которых мы подключаем датчик расстояния и использовать методы объекта. В нашем примере для получения расстояния в сантиметрах нужно использовать ping_cm().
#include
Пример подключения ультразвукового дальномера HC SR04 с одним пином
Подключение HC-SR04 к Arduino может быть выполнено посредством использования одного пина. Такой вариант пригодится, если вы работаете с большим проектом и вам не хватает свободных пинов. Для подключения вам нужно просто установить между контактами TRIGи ECHO резистор номиналом 2.2K и подключить к ардуино контакт TRIG.
#include
Краткие выводы
Ультразвуковые датчики расстояния достаточно универсальны и точны, что позволяет их использовать для большинства любительских проектов. В статье рассмотрен крайне популярный датчик HC SR04, который легко подключается к плате ардуино (для этого следует сразу предусмотреть два свободных пина, но есть вариант подключения и с одним пином). Для работы с датчиком существуют несколько бесплатных библиотек (в статье рассмотрена лишь одна из них, NewPing), но можно обойтись и без них – алгоритм взаимодействия с внутренним контроллером датчика достаточно прост, мы показали его в этой статье.
Исходя из собственного опыта, можно утверждать, что датчик HC-SR04 показывает точность в пределах одного сантиметра на расстояниях от 10 см до 2 м. На более коротких и дальних дистанциях возможно появление сильных помех, что сильно зависит от окружающих предметов и способа использования. Но в большинстве случаев HC-SR04 отлично справлялся со своей работой.
Самодельное охранное оборудование
В. ГУСЬКОВ, В. СВИРИДОВ, г. Самара
Радио, 2002 год, № 8
Работа многих систем охранной сигнализации основана на очень простом принципе: в охраняемом помещении в неурочное время не должно быть никакого движения. Чтобы обнаружить его, помещение "заполняют" излучением - чаще всего радио- или акустическим. Многократно отразившись от стен и находящихся в помещении предметов, лучи достигают приемника. Любое изменение обстановки вызовет модуляцию принятого сигнала, что и зафиксирует датчик.
Акустические (ультразвуковые) датчики такого типа имеют довольно существенное преимущество над использующими радиоволны - ничего не излучая в "эфир", они не требуют оформления разрешений на установку и эксплуатацию. Читателям предлагается описание одного из подобных датчиков, сравнительно простого и достаточно чувствительного для охраны помещения площадью до 20 м 2 .
В отличие от акустических датчиков, описания которых были ранее опубликованы в журнале "Радио" , предлагаемый действует по несколько иному принципу, защищенному патентом .
Основные технические характеристики
Частота звука, кГц...............10
Излучаемая акустическая
мощность, мВт, не более........5
Напряжение питания (постоянное), В................10...16
Потребляемая мощность
в дежурном режиме, мВт......120
Габариты, мм............150x50x30
Выходная цепь - "сухие" контакты реле, кроме того, о срабатывании сигнализирует зажигание светодиода.
Схема прибора
Для увеличения кликните по изображению (откроется в новом окне)
К входу усилителя на ОУ DA1.1 и DA1.2 подключен пьезоэлектрический микрофон ВМ1, к выходу - пьезоэлектрический звукоизлучатель BF1. В результате усилитель охвачен акустической обратной связью через контролируемый газовый объем, за счет которой в системе возникают автоколебания. Их частота зависит от АЧХ и ФЧХ элементов (в первую очередь микрофона и излучателя) и от акустических свойств охраняемого помещения. Амплитуду колебаний поддерживает постоянной система АРУ из детектора на диодах VD2, VD3 и усилителя на одном из элементов микросхемы DA2 К176ЛП1. Регулирующими элементами АРУ служат имеющиеся в той же микросхеме отдельные полевые транзисторы, участки сток-исток которых включены в цепи местной обратной связи каскадов на ОУ DA1.1 и DA1.2.
Если в чувствительной зоне датчика движется какой-либо объект (нарушитель), изменяется затухание и задержка отраженных от него акустических волн, что приводит к изменению амплитуды генерируемых датчиком колебаний. Цепями R7C10 и R6C1C6 заданы частотные характеристики контура АРУ, необходимые для устойчивой работы датчика в различных условиях при эффективном слежении за изменениями амплитуды сигнала.
Переменная составляющая напряжения на выходе усилителя АРУ, вызванная движением, поступает на вход компаратора DA1.3. Порог срабатывания устанавливают подстроечным резистором R8. К выходу компаратора через буферный усилитель из двух соединенных параллельно элементов микросхемы DD1 подключен светодиод HL1, вспышками свидетельствующий о движении в охраняемом помещении.
Кроме того, сигнал с выходов элементов DD1.1 и DD1.2 запускает одновибратор на элементах DD1.3 и DD1.4, импульсы которого открывают ключ на транзисторе VT2, заставляя сработать реле К1. Одновибратор генерирует импульсы лишь при условии, что на входе 13 элемента DD1.4 - высокий логический уровень. Благодаря цепи R14C16 этот уровень будет достигнут лишь через некоторое время после включения питания, давая датчику возможность войти в установившийся режим, не подавая сигналов тревоги.
Если тревожные импульсы повторяются слишком часто, конденсатор С16 разряжается через резистор R16 и диод VD5, что блокирует запуск одновибрато-ра и предотвращает лишние срабатывания реле К1. Таким образом достигается значительная экономия ресурса реле и потребляемой мощности.
Стабилизатор напряжения питания построен по несколько необычной схеме с регулирующим транзистором VT1 в минусовой цепи, что позволило уменьшить число деталей в приборе. Диод VD1 защищает от неправильной полярности подключения к источнику питания.
Внешний вид датчика показан на рис. 2.

Он собран на печатной плате, помещенной в корпус из изоляционного материала, например, полистирола. На верхней крышке корпуса установлены микрофон ВМ1 и излучатель BF1, акустически изолированные от корпуса и друг от друга с помощью поролоновых шайб толщиной 3 мм. Чем больше расстояние между излучателем и микрофоном, тем выше чувствительность датчика. В авторской конструкции оно составило 100 мм. В той же крышке предусмотрено отверстие для светодиода HL1.
В качестве BF1 и ВМ1 применены одинаковые пьезопреобразователи ВУТА-1, выпускаемые предприятием «Альфа-Оптим» (г. Волгоград). Замена их на более высокочастотные и чувствительные желательна, однако это потребует некоторых доработок датчика, изменяющих частотные характеристики контура автогенерации.
В датчике установлены оксидные конденсаторы К50-35, керамические К10-17, резисторы МЛТ-0,125, реле РЭС55А (паспорт РС4.569.600-01). Транзисторы КТ361Б можно заменить на КТ361Г, КТ361Е и другие маломощные кремниевые структуры р-п-р.
При регулировке чувствительности датчика (подстроечным резистором R8) иногда приходится для достижения нужного результата поменять местами выводы 12 и 13 элемента DA1.3.
ЛИТЕРАТУРА
1. Вилл В. Ультразвуковой автосторож. - Радио, 1996, № 1, с. 52-54.
2. Волков А. УЗ датчик охранной сигнализации. - Радио, 1996, № 5, с. 54-56.
3. Койнов А. Ультразвуковое охранное устройство. - Радио, 1998, № 7, с. 42.
4. Гуськов В., Гуськова М. Способ для определения изменения состояния объема, заполненного упругой средой, и устройства (варианты) для его осуществления. - Патент РФ № 2104494 МКИ 6G 01D1/18, заявлено 26 января 1995 г., опубликовано 10 февраля 1998 г.
Новые статьи
● Проект 23: Ультразвуковой датчик расстояния HC-SR04. Принцип работы, подключение, пример
В этом эксперименте мы рассмотрим ультразвуковой датчик для измерения расстояния и создадим проект вывода показаний датчика на экран ЖКИ WH1602.
Необходимые компоненты:
Ультразвуковой дальномер HC-SR04 (рис. 23.1) - это помещенные на одну плату приемник и передатчик ультразвукового сигнала. Излучатель генерирует сигнал, который, отразившись от препятствия, попадает на приемник. Измерив время, за которое сигнал проходит до объекта и обратно, можно оценить расстояние. Кроме самих приемника и передатчика, на плате находится еще и необходимая обвязка, чтобы сделать работу с этим датчиком простой и удобной.
Характеристики ультразвукового дальномера HC-SR04:
Измеряемый диапазон - от 2 до 500 см;
. точность - 0,3 см;
. угол обзора - < 15°;
. напряжение питания - 5 В.
Датчик имеет 4 вывода стандарта 2,54 мм:
VCC - питание +5 В;
. Trig (T) - вывод входного сигнала;
. Echo (R) - вывод выходного сигнала;
. GND - земля.
Последовательность действий для получения данных такова:
Подаем импульс продолжительностью 10 мкс на вывод Trig;
. внутри дальномера входной импульс преобразуется в 8 импульсов частотой 40 кГц и посылается вперед через излучатель T;
. дойдя до препятствия, посланные импульсы отражаются и принимаются приемником R, в результате получаем выходной сигнал на выводе Echo;
. непосредственно на стороне контроллера переводим полученный сигнал в расстояние по формуле:
Ширина импульса (мкс) / 58 = дистанция (см);
-- ширина импульса (мкс) / 148 = дистанция (дюйм).
В нашем эксперименте мы создадим звуковую сигнализацию, которая будет включаться при приближении к плате Arduino на расстояние меньше 1 м. Датчик размещен на кронштейне вращающейся сервы и контролирует пространство с углом обзора 180°. Если датчик обнаруживает объект в радиусе 1 м, подается звуковой сигнал на пьзоизлучатель, вращение сервы прекращается. Схема соединения элементов представлена на рис. 23.2.

Рис. 23.2. Схема соединения элементов для звуковой сигнализации
При написании скетча будем использовать библиотеку Servo для работы с сервоприводом и библиотеку Ultrasonic.
Для работы Arduino с датчиком HC-SR04 имеется готовая библиотека - Ultrasonic.
Конструктор Ultrasonic принимает два параметра: номера пинов, к которым подключены выводы Trig и Echo, соответственно:
Ultrasonic ultrasonic(12,13);
Содержимое скетча показано в листинге 23.1.
#include
Порядок подключения:
1. Закрепляем датчик расстояния HC-SR04 на сервоприводе.
2. Подключаем датчик HC-SR04, пьезозуммер и сервопривод к плате Arduino по схеме на рис. 23.2.
3. Загружаем в плату Arduino скетч из листинга 23.1.
4. Наблюдаем за циклическим перемещением сервопривода, при попадании объекта в поле зрения датчика HC-SR04 пьезозуммер издает сигнал, сервопривод останавливается, при исчезновении объекта из поля зрения датчика сервопривод возобновляет движение.
Листинги программ
Сенсорные устройства, преобразующие электрический ток в волны ультразвука, называются ультразвуковые датчики. Их принцип действия аналогичен работе радара, они улавливают цель по отраженному сигналу. Скорость звука – величина постоянная. На основании этого таким датчиком вычисляется расстояние до некоторого объекта, соответствующее диапазону времени между выходом сигнала и его возвращением.
Устройство и принцип действия
Работают ультразвуковые датчики основываясь на взаимодействии колебаний ультразвука с измеряемым пространством. Ультразвуковые колебания – это механические колебания, которые совершаются с частотой выше 20000 герц, а значит, больше верхней границы колебаний звука, воспринимаемого человеком.
Распространение таких колебаний в газообразных, жидких и твердых средах зависит от параметров самой среды. Скорость передачи колебаний для газов равна 200-1300 метров в секунду, для твердых тел 1500-8000 м/с, для жидких веществ 1100-2000 м/с. Значительно зависит скорость колебаний от давления газа.
Коэффициенты отражения волн ультразвука отличаются на границах различных сред, так же как и их способность поглощения звука. Поэтому ультразвуковые датчики используют для получения информации о разных неэлектрических параметрах с помощью измерения свойств колебаний ультразвука: сдвига фаз, времени затухания, распространения колебаний.
Ультразвуковые способы измерения являются электрическими, так как возбуждение колебаний и их прием осуществляется с помощью электричества. Чаще всего в датчиках применяют пьезоэлементы, преобразователи магнитострикционного вида. Для возбуждения колебаний ультразвуковой частоты применяется эффект растяжения и сжатия пьезокристалла, называемый обратным пьезоэффектом. Поэтому пьезоэлемент применяется как в качестве приемника колебаний, так и в качестве излучателя.
Излучатели магнитострикционного вида применяют эффект деформации ферромагнитов в магнитном поле. Излучатель стержневого вида выполнен в виде тонких листов ферромагнетика, на котором намотана катушка возбуждения.
В магнитострикционных излучателях часто применяются сплавы никеля, ферриты. При нахождении ферромагнитного стержня в переменном магнитном поле, он будет разжиматься, и сжиматься с частотой поля. На рисунке показана зависимость изменения (относительного) длины стержня от напряженности поля Н. Так как направление поля не влияет на знак деформации, то частота деформации будет в 2 раза выше частоты возбуждающего поля.
Чтобы получить значительные механические деформации применяют подмагничивание стержня. Магнитострикционные излучатели действуют в условиях резонанса, если частота поля возбуждения совпадает с колебаниями стержня, определяемыми по формуле:

Где l — длина стержня, Е — модуль упругости, р - плотность.
В излучателе на основе пьезоэлемента применяется кварцевая пластина, к которой подключено переменное напряжение U х, образующее электрическое поле по оси Х.

Обратный эффект состоит в деформации пластины по оси Х. Относительное изменение размера пластины (толщины) равно:
Δa/a=kUx/a
Поперечный эффект состоит в деформации пластины по оси У. Относительное изменение толщины пластины равно:
Δl/l=kUx/a
Размеры пластины не влияют на величину продольной деформации. Поперечная деформация повышается с увеличением отношения l/а. При разности потенциалов до 2500 вольт имеется прямая зависимость деформации и напряжения. При высоких напряжениях деформация повышается не так интенсивно. Амплитуда колебаний доходит до наибольшего значения, когда частота напряжения и частота колебаний пластины совпадают.
Частота продольных колебаний вычисляется:

Модуль упругости определяется по оси Х. Модуль упругости по оси У влияет на частоту поперечных колебаний:

Если сравнить два рассмотренных типа излучателей, то можно сделать вывод, что пьезоэлектрические излучатели могут обеспечить большую частоту колебаний ультразвука.
Рассмотрим работу датчика по времени прохождения сигнала. Обработка отраженного сигнала осуществляется в той же точке, откуда и излучается. Такой метод является непосредственным обнаружением.

Рис 1
Ультразвуковые датчики в момент времени Т 0 излучают сигнал (некоторый набор импульсов) длительностью ∆t, распространяющийся в среде со звуковой скоростью С. При достижении объекта сигналом, часть его отражается и возвращается в приемник за время Т 1 . Схема электронного устройства, предназначенная для обработки сигнала, определяет расстояние, вычисляя время Т 1 — Т 0 .
Для определения расстояния может использоваться схема с одной или двумя головками датчика. В случае с двумя головками, одна из них излучает сигнал, а вторая принимает отраженный сигнал.
Ультразвуковые датчики с одной головкой
Эта схема обладает значительным недостатком, который заключается в том, что после выдачи сигнала необходимо время для успокоения мембраны для дальнейшей работы на прием отраженного сигнала. Этот период времени называют «мертвым» временем.
Мертвое время вынуждает ультразвуковые датчики работать в «слепой зоне». Другими словами, когда объект расположен очень близко, то отраженный сигнал возвращается в измерительную головку настолько быстро, что она еще не перестроилась на работу приема, вследствие чего объект не обнаруживается.

Рис 2
Продолжительность процессов перехода от излучателя до приемника зависит от различных факторов, которыми являются: особенности устройства датчика, материал изготовления, внутреннее затухание, общая колеблющаяся масса.
На рисунке 2 изображена схема функционирования датчика непосредственного обнаружения. С помощью импульса запуска схема возбуждения излучателя становится активной. Она формирует некоторый набор импульсов. Тем же импульсом запуска производится блокировка входа усилителя приемника. При отключении излучателя происходит разблокировка приемника.
Восстановление приемника происходит около 300 мкс. Это намного меньше времени успокоения излучателя. Вследствие этого параметры приемника не оказывают влияния на размер слепой зоны.
При нахождении объекта с необходимой способностью отражения в контролируемой зоне, отраженный сигнал возбуждает на мембране переменное напряжение высокой частоты, которое обрабатывается методами обнаружения сигналов аналогового типа: усиливается, ограничивается, приходит на компаратор.
Это напряжение превышает заданное значение порога обнаружения, что является сигналом того, что объект находится в контролируемой зоне. Схема электронного устройства фиксирует промежуток времени, который прошел с момента активации излучателя и создает на выходе электрический сигнал. Длина этого сигнала зависит от размера этого интервала времени, и передается на цифровой индикатор.
Схема управления после регистрации первого сигнала отражения задерживает создание следующего пускового импульса. При этом она ожидает вероятного прихода отраженного сигнала от наиболее удаленных объектов в контролируемой зоне.
Ультразвуковые датчики с двумя головками
Существенно сократить слепую зону можно путем использования двух разных головок датчика для приемника и излучателя. При этом необходимо создать наибольшую чувствительность схемы правильным выбором одинаковой частоты резонанса для приемника и излучателя.
Отслеживание порога
Размер слепой зоны является важным параметром ультразвукового датчика, который определяет его успех применяемости. Поэтому изготовители стараются снизить эту величину разными способами.
Для таких целей применяют метод отслеживания порога обнаружения. На малых расстояниях в течение процесса перехода сигнал успевает много раз пройти путь между объектом и сенсором. Точность обнаружения значительно уменьшается вследствие искажений, которые вносит сигнал с многократным отражением. Погрешность этого метода возрастает с приближением к объекту.
Это заставляет найти компромисс между точностью измерения, ложной тревоги и чувствительностью обнаружения. На рисунке 3 показан способ отслеживания порога обнаружения.

Рис 3
Он заключается в том, что напряжение порога детектора, которое подается на , создается напряжением, изменяемым во времени и копирующим форму «хвоста» набора импульсов, получаемых во время затухания колебаний мембраны.
Проблема заключается в том, что детектору неизвестно какой по счету из отраженных сигналов превзошел границу порога обнаружения. По рисунку видно, что второй из отраженных сигналов оказался зарегистрированным. Это привело к определению расстояния величиной, превышающей действительную величину в два раза. Такую ситуацию нельзя допускать, поэтому датчики подлежат настройке, во избежание попадания объектов в слепую зону.
Примерные свойства ультразвуковых датчиков в зависимости от расстояния приводятся в таблице

Использование способа отслеживания границы чувствительности дало возможность снизить слепую зону в два раза. Но для применения датчиков возле слепой зоны необходима тщательная проработка. Поэтому в свойствах датчика по расстоянию кроме интервала зондирования приведен интервал настройки.
Интервал зондирования – это интервал расстояния обнаружения, который определяется только возможностями датчика в виде направленности и мощности луча, а также свойствами объекта.
Интервал настройки – это интервал расстояний, в котором можно регулировать датчик по месту для его наилучшего применения в конкретном случае. При этом необходимо учитывать расположение объекта относительно датчика и его свойства.